Тазартылған тұрақты электр қозғалтқышы - Brushed DC electric motor
A щеткалы тұрақты электр қозғалтқышы ішкі болып табылады ауыстырылған электр қозғалтқышы іске қосуға арналған тұрақты ток қуат көзі. Қылқаламды қозғалтқыштар электр қуатын басқарудың механикалық энергиясына алғашқы коммерциялық маңызды қолданылуы болды, ал коммерциялық және өндірістік ғимараттарда қозғалтқыштарды пайдалану үшін тұрақты токты тарату жүйелері 100 жылдан астам уақыт қолданылды. Тазартылған тұрақты ток қозғалтқыштары жұмыс кернеуін немесе магнит өрісінің күшін өзгерту арқылы жылдамдықпен өзгертілуі мүмкін. Өрістің қуат көзіне қосылуларына байланысты щеткамен қозғалтқыштың жылдамдығы мен айналу моментінің сипаттамаларын механикалық жүктемеге кері пропорционалды тұрақты жылдамдықты немесе жылдамдықты қамтамасыз ету үшін өзгертуге болады. Қылқаламды электр қозғалтқыштары, крандар, қағаз машиналар және болат прокат өндірістері. Theеткалар тозып, ауыстыруды қажет ететіндіктен, щеткасыз тұрақты ток қозғалтқыштары қолдану электрондық құрылғылар көптеген қосымшалардан щеткалы моторларды ығыстырды.
Қарапайым екі полюсті тұрақты қозғалтқыш
Келесі графика қарапайым, екі полюсті бейнелейді, щеткамен, Тұрақты ток қозғалтқышы.


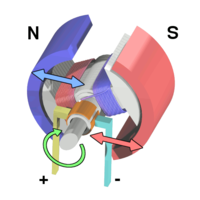


Сыртқы магнит өрісінің ішінде орналасқан жұмсақ темір өзектің айналасындағы катушкадан ток өткенде оң полюстің бүйір жағына жоғары бағытталған күш әсер етеді, ал екінші жағына төмен қарай әсер етеді. Сәйкес Флемингтің сол жақ ережесі, күштер катушкаға бұрылыс әсерін тигізіп, оны айналдырады. Қозғалтқышты тұрақты бағытта айналдыру үшін «тұрақты ток» коммутаторлары әрбір жарты циклда (екі полюсті қозғалтқышта) токты кері бағытта айналдырады, осылайша қозғалтқыш сол бағытта айнала береді.
Жоғарыда көрсетілген қозғалтқыштың проблемасы - катушканың жазықтығы магнит өрісіне параллель болғанда, яғни. ротордың полюстері статор полюстерінен 90 градус қашықтықта болған кезде - айналу моменті нөлге тең. Жоғарыдағы суреттерде бұл катушканың өзегі көлденең болған кезде пайда болады - ол оң жақтағы екінші-соңғы суретте жетуге жақын. Қозғалтқыш бұл күйде іске қосыла алмас еді. Алайда, ол іске қосылғаннан кейін, осы позиция арқылы импульс арқылы айнала береді.
Бұл қарапайым полюстің дизайнында екінші мәселе бар. Крутящий момент жағдайында екі коммутатор щеткасы екі коммутатор тақтасына тиіп (көпірленеді), нәтижесінде қысқа тұйықталу пайда болады. Қуат сымдары коммутаторлық тақталар арқылы бір-біріне тұйықталады, сонымен қатар катушка екеуі арқылы қысқа тұйықталады щеткалар (катушка екі рет қысқартылады, әр щетка арқылы бір рет). Бұл проблеманың жоғарыдағы басталмайтын мәселеге тәуелсіз екендігін ескеріңіз; бұл жағдайда катушкада үлкен ток болған жағдайда да, нөл моменті болады. Мәселе мынада, бұл қысқа тұйықталу қуатты ешқандай қозғалыссыз (тіпті тіпті катушка тогынсыз) тұтынады. Төмен тогы бар аккумуляторлы демонстрацияда бұл тұйықталу әдетте зиянды болып саналмайды. Алайда, егер екі полюсті қозғалтқыш бірнеше жүз ватт қуаттылықпен нақты жұмыс істеуге арналған болса, онда бұл қысқарту коммутатордың қатты қызып кетуіне, щетканың бұзылуына және щеткалардың коммутаторға дәнекерлеуіне әкелуі мүмкін. Жиі қолданылатын көміртекті щеткалар дәнекерлемейтін еді. Қалай болғанда да, мұндай қысқа уақыт өте ысырапшыл, батареяларды тез бітіреді және ең болмағанда электрмен жабдықтау компоненттерін қозғалтқышты қысқа жүріссіз іске қосу үшін қажет болатыннан әлдеқайда жоғары стандарттарға сәйкес жасауды талап етеді.

Қарапайым шешімнің бірі - щеткалардың ұштарынан кеңірек болатын коммутаторлық тақталар арасындағы аралықты қою. Бұл бұрыштық позициялардың нөлдік-моменттік диапазонын көбейтеді, бірақ қысқарту мәселесін жояды; егер қозғалтқыш сыртқы күшпен айналдыра бастаса, айналуды жалғастыра береді. Бұл модификация кезінде оны нөлдік моменттің (яғни коммутатордың байланысқа түспейтін) диапазонында тоқтату (тоқтату) арқылы тиімді түрде өшіруге болады. Бұл дизайн кейде үйде құрастырылған хобби моторларында көрінеді, мысалы. ғылыми жәрмеңкелер мен осындай дизайндарды кейбір ғылыми жобалар кітаптарынан табуға болады. Бұл қарапайым шешімнің айқын минусы - қозғалтқыш қазір бір айналымда екі рет айналу доғасының көмегімен жүреді және айналу моменті импульсті болады. Бұл электр желдеткіштері үшін немесе маховиктің айналуын ұстап тұру үшін жұмыс істеуі мүмкін, бірақ көптеген қосымшалар бар, тіпті іске қосу және тоқтату қажет емес, ол үшін ол жеткіліксіз, мысалы, таспаның көлігін немесе жылдамдықты жоғарылататын кез-келген инстанцияны басқару. жылдамдықты жоғарылату және тездету - бұл талап. Тағы бір кемшілігі - катушкаларда өзіндік өлшем бар болғандықтан индуктивтілік, оларда ағып жатқан ток кенеттен тоқтай алмайды. Қазіргі кезде коммутатор сегменті мен щетка арасындағы саңылау секіруге тырысып, доға тудырады.
Тіпті желдеткіштер мен маховиктер үшін де осы дизайндағы айқын әлсіздіктер, әсіресе ол барлық позициялардан өздігінен басталмайтындығы - оны пайдалану үшін, әсіресе бұрыннан бар жақсы баламаларды ескере отырып, практикалық емес етеді. Жоғарыдағы демонстрациялық қозғалтқыштан айырмашылығы, тұрақты ток қозғалтқыштары әдетте екіден көп полюстен тұрады, кез-келген позициядан іске қосуға қабілетті және қандай да бір катушкалар арқылы өтіп, электр қозғалтқыш қуатын шығармай ток жүре алатындай жағдайға ие емес. Ойыншықтар мен кішігірім тұрмыстық техникада қолданылатын көптеген қарапайым щеткамен қозғалмайтын тұрақты ток қозғалтқыштары, қарапайым қарапайым өндірілетін тұрақты ток қозғалтқыштары үш полюсті арматураларға ие. Енді қылқаламдар екі тұйықталған коммутатор сегменттерін қысқа тұйықталуды тудырмай жасай алады. Бұл үш полюсті арматуралардың артықшылығы да, щеткалардан шыққан ток екі катушкалар арқылы тізбектеле немесе тек бір катушкалар арқылы өтеді. Жеке катушкадағы токтан оның номиналды мәнінің жартысынан бастап (екі катушка арқылы сериялы ағу нәтижесінде) ол өзінің номиналды мәніне дейін көтеріліп, содан кейін осы шаманың жартысына дейін түседі. Содан кейін реттілік кері бағыттағы токпен жалғасады. Бұл идеалды синусоидалы катушка тогына біртіндеп жақындатуға әкеледі, әр катушкадағы ток квадрат толқынға жақын болатын екі полюсті қозғалтқышқа қарағанда біркелкі момент жасайды. Ағымдағы өзгерістер салыстырмалы екі полюсті қозғалтқыштың жартысына тең болғандықтан, щеткаларда доға жасау аз болады.
Егер тұрақты ток қозғалтқышының білігі сыртқы күштің әсерінен бұрылса, қозғалтқыш генератор сияқты әрекет етеді және ан шығарады Электр қозғаушы күш (ЭМӨ). Қалыпты жұмыс кезінде қозғалтқыштың айналуы кернеу шығарады қарсы ЭҚК (CEMF) немесе кері ЭҚК, себебі ол қозғалтқыштағы кернеуге қарсы тұрады. Артқы ЭҚК - бұл қозғалтқыш еркін жұмыс істеген кезде оның орамындағы сым сияқты электр кедергісі төмен болып көрінбейді. Бұл қозғалтқышты генератор ретінде пайдаланған кезде пайда болатын бірдей ЭҚК (мысалы, электр жүктемесі, мысалы, электр шамы қозғалтқыштың терминалдарына орналастырылғанда және қозғалтқыш білігі сыртқы моментпен қозғалғанда). Демек, қозғалтқыштағы жалпы кернеудің төмендеуі CEMF кернеуінің төмендеуінен және якорь орамдарының ішкі кедергісінен болатын паразиттік кернеудің төмендеуінен тұрады. Қозғалтқыш арқылы өтетін ток келесі теңдеумен беріледі:

Қозғалтқыш өндіретін механикалық қуат:

Жүктелмеген тұрақты ток қозғалтқышы айналған кезде қозғалтқышқа түсетін токқа қарсы бағытталған ағынды электр қозғалтқыш күшін тудырады. Қозғалтқыш арқылы өтетін ток айналу жылдамдығы артқан сайын төмендейді, ал еркін айналатын қозғалтқышта ток өте аз болады. Қозғалтқышқа жүктеме роторды баяулататын кезде ғана қозғалтқыш арқылы ток күші артады.
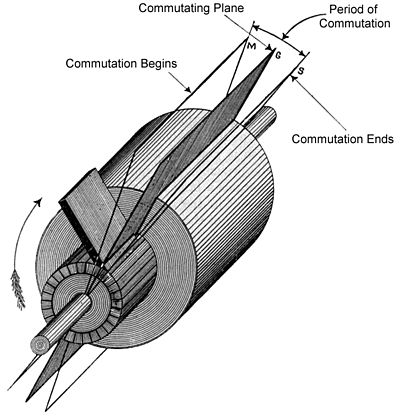
Коммутациялық жазықтық
Динамода, қылқалам жұбы коммутаторға тиетін және арматураның айналу осіне параллель болатын жанасу аймақтары центрлері арқылы өтетін жазықтық деп аталады. коммутациялық ұшақ. Бұл диаграммада коммутатор жазықтығы щеткалардың біреуі үшін көрсетілген, егер басқа щетка коммутатордың екінші жағында радиалды симметриямен байланыс орнатылған болса, көрсетілген щеткадан 180 градус.
 |
Статор өрісінің бұрмалануы үшін өтемақы
Нағыз динамода алаң ешқашан біркелкі болмайды. Оның орнына, ротор айналған кезде, айналмалы емес статордың магниттік сызықтарын сүйрейтін және бұрмалайтын өріс эффекттерін тудырады.
 Өрісті ротор қалай бұрмалайтындығы туралы асыра айтылған мысал. |  Темір үгінділері ротордағы бұрмаланған өрісті көрсетеді. |
Ротор неғұрлым тез айналса, өрістің бұрмалану дәрежесі соғұрлым көп болады. Динамо ротор өрісімен статор өрісіне тік бұрыш жасап тиімді жұмыс істейтіндіктен, ротор өрісін бұрмаланған өріске тік бұрышта болу үшін дұрыс күйге келтіру үшін қылқалам күйін баяулатып немесе алға жылжыту керек.
 Коммутациялық жазықтықтың орталық орналасуы, егер өрісті бұрмалау әсері болмаса. |  Өрістің бұрмалануын өтеуге арналған коммутациялық жазықтықтың нақты жағдайы. |
Бұл өріс эффектілері спин бағытын өзгерткен кезде қалпына келтіріледі. Сондықтан тиімді қайтымды коммутацияланған динамо құру қиын, өйткені өрістің жоғары беріктігі үшін щеткаларды қалыпты бейтарап жазықтықтың қарама-қарсы жағына жылжыту қажет.
Эффект ішкі жану қозғалтқышындағы уақытты ілгерілетуге ұқсас деп санауға болады. Әдетте, белгілі бір жылдамдықта жұмыс істеуге арналған динамо, оның щеткалары өрісті сол жылдамдықта ең жоғары тиімділікке сәйкестендіру үшін тұрақты түрде бекітілген болады.[1]
Жаралы статорлары бар тұрақты ток машиналары бұрмалануды өтейді ауыспалы өріс орамдары және өтемдік орамдар.
Қозғалтқыштың дизайны
Тұрақты ток қозғалтқыштары
Тазартылған тұрақты ток қозғалтқыштары жаралы роторлармен немесе орамалы немесе тұрақты магнитті статорлармен жасалады.
Жаралы статорлар
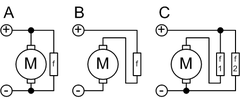
- А, Шант
- B, серия
- С, қосылыс
- f, өріс катушкасы
Далалық катушкалар дәстүрлі түрде төрт негізгі форматта болған: бөлек қозған (сепекс), серия -жарақат, шунт -жара, және соңғы екеуінің тіркесімі; құрама жара.
Ішінде сериялық мотор, өріс катушкалары электрлік арматура катушкаларымен (щеткалар арқылы) тізбектей жалғанады. Шунтты жара қозғалтқышында өріс катушкалары параллель қосылады немесе якорь катушкаларына «шунтталады». Бөлек қозған (сепекс) қозғалтқышта өріс катушкалары тәуелсіз көзден жеткізіледі, мысалы қозғалтқыш-генератор ал өріс тогына арматура тогының өзгеруі әсер етпейді. Кейде тұрақты токта сепекс жүйесі қолданылған тарту қозғалтқыштары бақылауды жеңілдету дөңгелектер.
Тұрақты магнитті қозғалтқыштар
Тұрақты-магнитті типтердің тұрақты токқа қарағанда қозғалмалы, қозғалмалы, синхронды және бөлшек ат күшінде басым болды. Олар басқаларына қарағанда кішірек, жеңіл, тиімдірек және сенімді жалғыз тамақтандырылатын электр машиналары.[2]
Бастапқыда барлық тұрақты өнеркәсіптік тұрақты қозғалтқыштарда жара өрісі немесе роторлы магниттер қолданылған. Тұрақты магниттер дәстүрлі түрде кішігірім қозғалтқыштарда ғана пайдалы болды, өйткені беріктігі жоғары өрісті ұстап тұруға қабілетті материал табу қиын болды. Тек жақында материалдар технологиясының дамуы жоғары қарқынды тұрақты магниттер жасауға мүмкіндік берді, мысалы неодим магниттері, өрістің катушкаларының және қоздыру құралдарының қосымша көлемінсіз ықшам, қуатты қозғалтқыштардың дамуына мүмкіндік береді. Бірақ бұл жоғары тұрақты магниттер электр қозғалтқышында немесе генераторлық жүйелерде көбірек қолданыла бастаған кезде, басқа да мәселелер шешілуде (қараңыз) Тұрақты магнитті синхронды генератор ).
Осьтік өріс қозғалтқыштары
Дәстүрлі түрде өріс радиалды түрде қолданылды - қозғалтқыштың айналу осінен және одан алыс. Дегенмен, кейбір конструкцияларда қозғалтқыш осі бойынша өріс ағып тұрады, оның айналуы кезінде ротор өріс сызықтарын кеседі. Бұл магнит өрістерін әлдеқайда күшейтуге мүмкіндік береді, әсіресе галбах массивтері жұмыспен қамтылған. Бұл өз кезегінде моторға төмен жылдамдықта қуат береді. Алайда, фокустық ағынның тығыздығы жоғары коэффициентке қарамастан тұрақты магниттің ағынының шектеулі қалдық тығыздығына байланысты көтеріле алмайды және барлық электр машиналары сияқты, магниттік өзектің қанығу ағынының тығыздығы дизайнның шектеуі болып табылады.
Жылдамдықты басқару
Әдетте, тұрақты қозғалтқыштың айналу жылдамдығы мен пропорционал ЭҚК оның катушкасында (= оған қолданылатын кернеу минус кернеуді жоғалтады) және момент токқа пропорционалды. Жылдамдықты басқаруға батареяның айнымалы соққысы, айнымалы кернеу, резисторлар немесе электронды басқару арқылы қол жеткізуге болады. Имитациялық мысалды мына жерден табуға болады[3] және.[4] Жарақат алаңының тұрақты қозғалтқышының бағытын өрісті немесе якорь қосылыстарын кері айналдыру арқылы өзгертуге болады, бірақ екеуін де емес. Бұл әдетте арнайы жиынтығымен жасалады контакторлар (бағыттағыштар). Тиімді кернеуді тізбекті резисторды енгізу арқылы немесе электронды басқарылатын коммутациялық құрылғы арқылы өзгертуге болады тиристорлар, транзисторлар, немесе, бұрын, сынап доғасын түзеткіштер.[5]
Параллель
Параллельді басқару теміржолды басқарудың стандартты әдісі болды тарту қозғалтқыштары пайда болғанға дейін электроника. Ан электровоз немесе пойызда әдетте үш түрлі жолмен топтастырылатын төрт қозғалтқыш болады:
- Төртеуі де сериялы (әр қозғалтқыш желілік кернеудің төрттен бірін алады), ең төменгі жылдамдық
- Екі қатарлас екі параллель топ (әр қозғалтқыш желілік кернеудің жартысын алады)
- Төртеуі де параллель (әр қозғалтқыш толық кернеу алады), ең жоғары жылдамдық
Бұл ең төменгі қарсылық шығындарымен үш жылдамдықты қамтамасыз етті. Іске қосу және жеделдету үшін қарсылық арқылы қосымша бақылау қамтамасыз етілді. Бұл жүйені электронды басқару жүйелері ауыстырды.
Өрістің әлсіреуі
Тұрақты қозғалтқыштың жылдамдығын өрісті әлсірету арқылы арттыруға болады. Өріс кернеулігін азайту шунт өрісі бар қарсылықты тізбектей енгізу немесе өрістік орамдағы токты азайту үшін тізбектей жалғанған орамның айналасына кедергілерді енгізу арқылы жүзеге асырылады. Өріс әлсіреген кезде арқа-эмф азаяды, сондықтан якорь орамынан үлкен ток өтеді және бұл жылдамдықты арттырады. Өрістің әлсіреуі өздігінен емес, басқа әдістермен қатар қолданылады, мысалы, қатарлы-параллельді басқару.
Чоппер
А деп аталатын тізбекте ұсақтағыш, қозғалтқышқа қолданылатын орташа кернеу қорек кернеуін өте тез ауыстыру арқылы өзгереді. Орташа қолданылатын кернеуді өзгерту үшін «қосу» мен «өшіру» қатынасы өзгергендіктен, қозғалтқыштың айналу жиілігі әр түрлі болады. Уақыттың «қосылу» пайыздық мөлшерлемесі қуат кернеуіне көбейтілгенде қозғалтқышқа қолданылатын орташа кернеу беріледі. Демек, 100 В қуатымен және 25% «қосулы» уақытпен қозғалтқыштағы орташа кернеу 25 В болады. «Өшіру» уақытында якорь индуктивтілігі токтың «ұшып кететін диод» деп аталатын диод арқылы жалғасуына әкеледі. », қозғалтқышпен қатар. Циклдың осы нүктесінде қоректену тогы нөлге тең болады, демек, қозғалтқыштың орташа тоғы әрдайым қоректену тогынан жоғары болады, егер «қосылу» уақыты 100% болмаса. Уақыттың 100% -ында «қозғалтқыштың» қоректенуі мен ток күші тең. Жылдам ауысу сериялы резисторларға қарағанда энергияны аз жұмсайды. Бұл әдіс сонымен қатар аталады импульстің енін модуляциялау (PWM) және оны жиі микропроцессор басқарады. Нәтиже сүзгі кейде қозғалтқышқа қолданылатын орташа кернеуді тегістеу және қозғалтқыштың шуын азайту үшін орнатылады.
Тізбектелген тұрақты ток қозғалтқышы ең жоғары айналу моментін төмен жылдамдықта дамытатындықтан, ол жиі қолданылады тарту электр сияқты қосымшалар локомотивтер, және трамвайлар. Тағы бір қосымша - бензинді және шағын дизельді қозғалтқыштарға арналған стартерлік қозғалтқыштар. Диск жетегі істен шығуы мүмкін қосымшаларда сериялық қозғалтқыштарды ешқашан қолдануға болмайды (мысалы, белдік жетектері). Қозғалтқыш жылдамдатылған кезде якорь (демек өріс) ток азаяды. Өрістің азаюы қозғалтқышты жылдамдатуға әкеледі, ал төтенше жағдайларда қозғалтқыш өзін-өзі құртып жіберуі мүмкін, дегенмен бұл желдеткішпен салқындатылатын қозғалтқыштарда (өздігінен басқарылатын желдеткіштерде) проблема аз. Бұл адгезияның жоғалуы кезінде теміржол қозғалтқыштарында проблема болуы мүмкін, өйткені тез бақылауға алынбаса, қозғалтқыштар қалыпты жағдайда жұмыс істейтін жылдамдықтардан әлдеқайда жоғары болады. Бұл қозғалтқыштардың өздеріне және тісті доңғалақтарға қиындықтар тудырып қана қоймай, рельстер мен дөңгелектер арасындағы дифференциалды жылдамдыққа байланысты рельстер мен дөңгелектердің протекторларына қатты зақым келтіруі мүмкін, өйткені олар тез қызады және салқындатылады. Өрістің әлсіреуі электромобильдің максималды жылдамдығын арттыру үшін кейбір электрондық басқару элементтерінде қолданылады. Ең қарапайым формада контактор мен өрісті әлсірететін резистор қолданылады; электронды басқару қозғалтқыш тогын бақылайды және өрістің әлсіреу резисторын қозғалтқыш тогы алдын-ала орнатылған мәннен төмендеген кезде тізбекке қосады (бұл қозғалтқыш өзінің толық жұмыс жылдамдығында болғанда болады). Резистор тізбекте болғаннан кейін, қозғалтқыш номиналды кернеу кезінде жылдамдықты қалыпты жылдамдықтан арттырады. Қозғалтқыш тогы артқан кезде басқару резисторды ажыратады және төмен жылдамдық моменті қол жетімді болады.
Уорд Леонард
A Леонардты басқару әдетте шунтты немесе құрама орамалы тұрақты ток қозғалтқышын басқару үшін қолданылады және айнымалы ток көзінен жылдамдықпен басқарылатын қозғалтқышты қамтамасыз ету әдісі ретінде дамыған, бірақ тұрақты ток схемаларында оның артықшылығы жоқ емес. Айнымалы ток көзі айнымалы ток қозғалтқышын басқару үшін қолданылады, әдетте тұрақты ток генераторын немесе қозғалатын асинхронды қозғалтқышты динамо. Арматурадан тұрақты ток шығысы тұрақты қозғалтқыштың якорына тікелей байланысты (кейде, бірақ әрқашан бірдей конструкциялы емес). Екі тұрақты ток машинасының шунт өрісі орамалары айнымалы резисторлар арқылы дербес қоздырылады. Қозғалтқыштан және / немесе қозғалтқыш өрісінің ток күшін өзгерту арқылы орнынан толық жылдамдыққа дейін жылдамдықты басқаруды және тұрақты моментті алуға болады. Бұл бақылау әдісі іс жүзінде оны дамытудан бастап қатты күйге ауыстырғанға дейінгі әдіс тиристор жүйелер. Ол жолаушылар лифтінен бастап үлкен шахта карьерінің орамдық механизміне дейін, тіпті өндірістік технологиялық машиналар мен электр крандарына дейін жылдамдықты жақсы бақылау қажет кез-келген жағдайда қызмет көрсетті. Оның негізгі жетіспеушілігі схеманы енгізу үшін үш машина қажет болды (бесеуі өте үлкен қондырғыларда, өйткені тұрақты ток машиналары көбіне қайталанатын және тандемдік айнымалы резистормен басқарылатын). Көптеген қосымшаларда қозғалтқыш генераторы жиі қажет болған жағдайда оны іске қосудан туындайтын кідірістерді болдырмау үшін үнемі жұмыс істеп тұрды. Электрондық (тиристорлық) контроллерлер Ward-Leonard жүйелерінің көпшілігінің орнын ауыстырғанымен, кейбір өте үлкендері (мың ат күші) қызмет етуде. Өрістің токтары якорь токтарына қарағанда әлдеқайда төмен, бұл орташа өлшемді тиристорлық қондырғыға тікелей басқаруға қарағанда әлдеқайда үлкен қозғалтқышты басқаруға мүмкіндік береді. Мысалы, бір қондырғыда 300 амперлік тиристорлық қондырғы генератордың өрісін басқарады. Генератордың шығыс тогы 15000 амперден асады, бұл тиристорлармен тікелей басқару өте қымбат (және тиімсіз) болады.
Тұрақты ток қозғалтқышының айналу моменті мен жылдамдығы
A Тұрақты қозғалтқыш Келіңіздер жылдамдық және момент сипаттамалары үш түрлі магниттелу көздеріне байланысты өзгереді, бөлек қозған өріс, өзін-өзі қоздыратын өріс немесе тұрақты өріс, олар механикалық жүктеме ауқымында қозғалтқышты басқару үшін таңдамалы түрде қолданылады. Өздігінен қозғалатын өріс қозғалтқыштары сериялы, шунт немесе якорьға қосылған күрделі жара болуы мүмкін.
Негізгі қасиеттері
Анықтаңыз
- Eб, индукцияланған немесе қарсы ЭҚК (V )
- Мена, арматура тогы (A )
- кб, санауыш ЭҚК теңдеуінің тұрақтысы
- кn, жылдамдық теңдеуінің тұрақтысы
- кТ, момент теңдеуінің тұрақтысы
- n, якорь жиілігі (айн / мин )
- Rм, қозғалтқыш кедергісі (Ω )
- Т, қозғалтқыш моменті (Nm )
- Vм, қозғалтқыштың кіріс кернеуі (V)
- Φ, машинаның барлығы ағын (Wb )
- Картер коэффициенті (кC) - бұл көбінесе ішіндегі тиімді слотты бағалау әдісі ретінде қолданылатын параметр арматура а мотор ашық (немесе жартылай жабық) слоттармен.[6]
Қарама-қарсы ЭҚК теңдеуі
Тұрақты ток қозғалтқышының есептегіші машинаның ағынының жалпы беріктігі мен якорь жылдамдығының көбейтіндісіне пропорционалды:
- Eб = kб Φ n[7]
Кернеу балансының теңдеуі
Тұрақты ток қозғалтқышының кіріс кернеуі есептегіш эмфті, сондай-ақ қозғалтқыш кедергісіндегі якорь тогы тудыратын кернеудің төмендеуін, яғни щеткалар, арматура орамасы және өрістің сериялы орамасы бойынша аралас кедергісін еңсеруі керек:
Момент теңдеуі
Тұрақты ток қозғалтқышының моменті якорь тогының көбейтіндісіне және машинаның жалпы ағынының күшіне пропорционалды:[10][11][12]

қайда
- кТ = кб/2π
Жылдамдық теңдеуі
Бастап
- n = Eб/кб Φ және
- Vм = Eб + Rм Мена

қайда
- кn = 1/кб
Момент және жылдамдық сипаттамалары
Шунт жарақатының моторы
Қозғалтқыштың кедергісі жоғары өрісті орау арматурамен параллель қосылған, Vм, Rм және Ø тұрақты, сондықтан жүктеме жылдамдығын толық реттеуге дейін жүктеме сирек 5% -дан аспайды.[16] Жылдамдықты бақылау үш жолмен жүзеге асырылады:[17]
- Өрістің кернеуін өзгерту
- Өрістің әлсіреуі
- Өріс тізбегіндегі айнымалы кедергі.
Қозғалтқыш сериясы
Сериялы қозғалтқыш жүктеменің жоғарылауына баяулау арқылы жауап береді; ток күшейеді және айналу моменті токтың квадратына пропорционалды түрде өседі, өйткені арматура мен өрістің орамаларында бірдей ток өтеді. Егер қозғалтқыш тоқтап қалса, ток тек орамдардың жалпы кедергісімен шектеледі және айналу моменті өте үлкен болуы мүмкін, бірақ орамдардың қызып кету қаупі бар. Ретінде сериялы қозғалтқыштар кеңінен қолданылды тарту қозғалтқыштары жылы теміржол көлігі[18] кез-келген түрдегі, бірақ пайдасына шығарылуда қуат түрлендіргіші - айнымалы ток асинхронды қозғалтқыштар. Есептегіш ЭҚК якорь арқылы токты шектеу үшін арматура кедергісіне көмектеседі. Қуат қозғалтқышқа бірінші рет қолданылған кезде якорь айналмайды, санауыш ЭҚК нөлге тең және якорь тогын шектейтін жалғыз фактор якорьдің кедергісі болып табылады.[19] Арматура арқылы өтетін перспективалық ток өте үлкен болғандықтан, қозғалтқыштың айналуы есептегіш ЭҚК-ны құрғанға дейін токты шектеу үшін арматурамен қатарынан қосымша қарсылық қажет болады. Қозғалтқыштың айналуы күшейген кезде қарсылық біртіндеп жойылады.
Тізбектелген тұрақты ток қозғалтқышының сериялы сипаттамасы оның толығымен жүктемені айналдыру моментіне тәуелді болатындығында. Бұл үлкен инерциялық жүктемелерге сәйкес келеді, өйткені қозғалтқыш максималды моменттен жылдамдайды, жүктеме артқан сайын айналу моменті азаяды.
Сериялы қозғалтқыштың айналу жиілігі қауіпті болуы мүмкін болғандықтан, сериялы қозғалтқыштар көбінесе беріліске немесе тікелей жүктемеге қосылады.[20]
Тұрақты магнитті қозғалтқыш
Тұрақты магнитті тұрақты ток қозғалтқышы айналу моменті тоқтағанда білікпен максималды болған кезде және айналу моменті қолданылмайтын және жылдамдықтың максималды шығу жылдамдығындағы айналу моменті арасындағы сызықтық қатынаспен сипатталады. Осы жылдамдық осінің екі нүктесінің арасында квадраттық қуат байланысы бар.[21]
Қорғаныс
Тұрақты ток қозғалтқышының қызмет ету мерзімін ұзарту үшін қорғаныс құралдары[22] және қозғалтқыш контроллері оны механикалық зақымданудан, шамадан тыс ылғалдан, жоғары диэлектрлік стресс және жоғары температура немесе термиялық жүктеме.[23] Бұл қорғаныс құрылғылары қозғалтқыштың ақаулық жағдайларын сезінеді[24] немесе ақаулық туындаған кезде операторға хабарлау үшін дабылды ескертуді немесе қозғалтқышты автоматты түрде сөндіріңіз. Шамадан тыс жүктеме жағдайында қозғалтқыштар жылу жүктемесінен қорғалған реле. Екі металды жылулық шамадан тыс қорғағыштар қозғалтқыштың орамдарына еніп, екі ұқсас емес металдардан жасалған. Олар осылай жасалынған биметалдық жолақтар басқару тізбегін ашып, қозғалтқышты қуатсыздандыру үшін температура орнатылған нүктеге жеткенде қарама-қарсы бағытта бүгіледі. Жылытқыштар - бұл қозғалтқыштың орамаларымен тізбектей жалғанған және қозғалтқышқа орнатылған сыртқы жылу жүктемесінің қорғағыштары контактор. Дәнекерленген ыдыстың қыздырғыштары шамадан тыс жүктеме жағдайында балқып кетеді, бұл қозғалтқышты басқару тізбегінің қозғалтқыштан қуат алуына әкеледі. Биметалды жылытқыштар ендірілген биметалл қорғағыштар сияқты жұмыс істейді. Сақтандырғыштар және ажыратқыштар ағынды немесе қысқа тұйықталу қорғаушылар. Жерге тұйықталу релесі де токтан жоғары қорғанысты қамтамасыз етеді. Олар қозғалтқыштың орамалары мен арасындағы электр тогын бақылайды жер жүйесі. Қозғалтқыш-генераторларда кері ток релесі аккумуляторды зарядсыздандырады және генераторды моторлайды. Қозғалтқыш өрісінің жоғалуы қауіпті қашу немесе жылдамдықтың жоғарылауын тудыруы мүмкін болғандықтан, өріс релесінің жоғалуы[25] өріс тогын сезіну үшін қозғалтқыш өрісіне параллель қосылған. Өріс тогы белгіленген нүктеден төмендеген кезде реле қозғалтқыштың якорьін қуатсыздандырады. Құлыпталған ротордың күйі қозғалтқыштың іске қосылу кезегін бастағаннан кейін оның үдеуіне жол бермейді. Қашықтық эстафеталары қозғалтқыштарды ротордың құлыпталған ақауларынан қорғаңыз. Қысқа қозғалтқыштың қорғанысы әдетте қозғалтқыш контроллерлеріне немесе стартерлеріне қосылады. Сонымен қатар, қозғалтқыштарды қорғауға болады асқын кернеу немесе жоғарылайды оқшаулау трансформаторлары, қуаттандырғыш жабдық, MOVs, тұтқындаушылар және гармоникалық сүзгілер. Қоршаған орта жағдайлары, мысалы, шаң, жарылғыш булар, су және қоршаған ортаның жоғары температурасы тұрақты ток қозғалтқышының жұмысына кері әсер етуі мүмкін. Қозғалтқышты қоршаған орта жағдайынан қорғау үшін Ұлттық электр өндірушілер қауымдастығы (NEMA) және Халықаралық электротехникалық комиссия (IEC) стандартталған қозғалтқыш қоршауына ие[26] қоршаған ортаны ластайтын заттардан қорғауға негізделген жобалар. Сияқты қазіргі заманғы бағдарламалық жасақтаманы жобалау сатысында пайдалануға болады Motor-CAD, қозғалтқыштың жылу тиімділігін арттыруға көмектесу.
Тұрақты ток қозғалтқыштары
Қарсы эмф арматура арқылы токты арматура арқылы шектеуге көмектеседі. Қуат қозғалтқышқа бірінші рет қолданылған кезде якорь айналмайды. Бұл сәтте қарсы эмф нөлге тең, якорь тогын шектейтін жалғыз фактор якорьдің кедергісі мен индуктивтілігі болып табылады. Әдетте қозғалтқыштың якорьге төзімділігі 1 Ом кем; сондықтан қуат қолданылған кезде арматура арқылы өтетін ток өте үлкен болады. Бұл ток кернеудің шамадан тыс төмендеуін контурдағы басқа жабдықтарға әсер етуі мүмкін, тіпті шамадан тыс қорғаныс құрылғыларын бұзуы мүмкін.
Сондықтан қозғалтқыштың айналуы қарсы эмф құрастырғанға дейін токты шектеу үшін арматурамен қатарынан қосымша қарсылық қажеттілігі туындайды. Қозғалтқыштың айналуы күшейген кезде қарсылық біртіндеп жойылады.
Қолмен іске қосылатын реостат

Электр және тұрақты электр қозғалтқышы технологиясы алғаш дамыған кезде, жабдықтың көп бөлігі үнемі қозғалтқыш жүйелерін басқаруға дайындалған оператордың қарауында болды. Қозғалтқышты басқарудың алғашқы жүйелері толығымен дерлік қолмен болды, кезекші қозғалтқыштарды іске қосады және тоқтатады, жабдықты тазалайды, кез-келген механикалық ақауларды жөндейді және т.б.
Алғашқы тұрақты қозғалтқыш-стартерлер де осы суретте көрсетілгендей толығымен қолмен жұмыс істеді. Әдетте операторға кіріс қуатын жұмыс жылдамдығына дейін біртіндеп арттыру үшін реостатты контактілер бойынша баяу жылжытуға он секундтай уақыт қажет болды. Бұл реостаттардың екі түрлі класы болды, біреуі тек іске қосу үшін, біреуі іске қосу және жылдамдықты реттеу үшін. Бастапқы реостат арзанға түсті, бірақ кішігірім қарсылық элементтері болды, егер қозғалтқышты тұрақты төмендетілген жылдамдықпен жұмыс істету қажет болса, жанып кетеді.
Бұл стартерде кернеу жоқ магниттік ұстау мүмкіндігі бар, ол реостаттың электр қуатын жоғалтқан жағдайда өшірулі күйге ауысуына әкеледі, сондықтан мотор кейінірек толық кернеу күйінде қайта іске қосылмайды. Ол сондай-ақ бар асқын Белгіленген мөлшерден артық ток анықталса, тетікті өшіру күйіне түсіретін қорғаныс.[27]
Үш нүктелі стартер
Кіріс қуаты L1 және L2 деп көрсетілген.[қайда? ] Үзілген сызықтардағы компоненттер үш нүктелі стартерді құрайды. Аты айтып тұрғандай, стартерге тек үш байланыс бар. Арматураға қосылыстар A1 және A2 ретінде көрсетілген. Өрістің (толқудың) катушкасының ұштары F1 және F2 түрінде көрсетілген. Жылдамдықты басқару үшін далалық реостат шунт өрісімен тізбектей қосылады. Сызықтың бір жағы стартердің қолына қосылған (диаграммада көрсеткімен көрсетілген). Қол серіппелі болғандықтан, ол басқа күйде болмаған кезде «Өшіру» күйіне оралады.
- Қолдың бірінші қадамында шунт өрісіне толық желілік кернеу қолданылады. Өріс реостаты әдетте минималды қарсылыққа орнатылғандықтан, қозғалтқыштың жылдамдығы артық болмайды; Сонымен қатар, қозғалтқыш үлкен іске қосу моментін дамытады.
- Сонымен қатар стартер электромагнитті шунт өрісімен тізбектей қосады. Ол магнитпен байланыста болған кезде қолды позицияда ұстайды.
- Сонымен қатар, кернеу шунт өрісіне қолданылады, ал бастапқы кедергі қарама-қарсы арматура тогын шектейді.
- Қозғалтқыш жылдамдықты арттырған кезде қарсы эмф пайда болады; қолды қысқа қарай баяу жылжытады.
Төрт нүктелі стартер
Төрт нүктелі стартер үш нүктелі стартердің кемшіліктерін жояды. Үш нүктелі стартерде қолданылған үш нүктеден басқа, L1 сызығының екінші жағы - қолды «Өшіру» позициясынан қозғаған кезде стартерге жеткізілген төртінші нүкте. Ұстайтын магниттің катушкасы сызық бойымен жалғасқан. Магнит пен іске қосу резисторлары үш нүктелі стартердегідей жұмыс істейді.
- Өріс тізбегін кездейсоқ ашу мүмкіндігі өте алыс. Төрт нүктелі стартер қозғалтқыштың кернеуінен қорғауды қамтамасыз етеді. Егер қуат өшсе, қозғалтқыш желіден ажыратылады.
Параметрлер мен статистиканы бағалау
- Бірнеше зерттеулер модельге тәуелді интеллектуалды емес бағалаушыларды ұсынады, мысалы, кеңейтілген Kalman сүзгісі (EKF)[28][29] және Луенбергердің бақылаушысы,[30] немесе ақылды бағалаушылар, мысалы, каскадты алға бағытталған нейрондық желі (CFNN) және квазиютондық BFGS кері тірегі[31] .
Сондай-ақ қараңыз
- Айнымалы ток
- Қылқаламсыз тұрақты ток электр қозғалтқышы
- Жүктелу кезінде тұрақты ток қозғалтқышының теңдеулері
Әдебиеттер тізімі
- ^ Хоукинске арналған электрлік нұсқаулық
- ^ Готлиб, И.М. (1994). Электр қозғалтқыштары және басқару әдістері (2-ші басылым). TAB Кітаптар.
- ^ MATLAB моделдеу коды тұрақты қозғалтқыштың жылдамдығын бақылау.
- ^ Далалық зерттеудің басқару жүйелерін жобалау және модельдеу Мобильді робот платформасы.
- ^ Ландер, Кирилл В. (1993). «8 D.C. машинаны басқару". Электроника (3-ші басылым). Лондон: Mc Graw Hill International Ұлыбритания. ISBN 0-07-707714-8.
- ^ Невилл, С .: 'Картер коэффициентін тар тістермен қолдану', Электр инженерлері институтының материалдары, 1967, 114, (9), б. 1245-1250
- ^ Хамейер, б. 66, экв. 5-3437
- ^ Линн, §8-144, б. 826, экв. 8-17
- ^ Хамейер, б. 66, экв. 5-20
- ^ Линн, §8-146, б. 826, экв. 8-18
- ^ Хамейер, б. 66, экв. 5-23
- ^ Линн, §147, б. 827, экв. 8-21
- ^ Линн, §8-147, б. 827, экв. 8-20
- ^ Хамейер, б. 68, экв. 5-31
- ^ Линн, §147, б. 827, экв. 8-22
- ^ Линн, §8-148 - §8-151, б. 827-828
- ^ Хамейер, б. 69
- ^ Алжир, §7-278, б. 757
- ^ Алжир, §7-277, б. 757
- ^ Линн, §8-154, б. 828
- ^ MIT CIPD
- ^ Герман, Стивен Л. Электр қозғалтқышын басқару. 9-шы басылым Дельмар, Cengage Learning, 2009. 12 бет.
- ^ Малколм Барнс. Айнымалы жылдамдықты жетектер және электр электроникасы. Elsevier, Newnes, 2003. 151 бет.
- ^ Дж. Льюис Блэкберн. Қорғаныс релесі: принциптері мен қолданылуы. CRC Press, 1998. 358 бет.
- ^ Ohio Electric Motors. Тұрақты электр қозғалтқышын қорғау. Ohio Electric Motors. 2011 жыл. Мұрағатталды 2011 жылғы 15 қараша, сағ WebCite
- ^ Х. Уэйн Бити және Джеймс Л. Киртли. Электр қозғалтқышы туралы анықтама. McGraw-Hill Professional, 1998. 97-бет.
- ^ Хоукинске арналған электрлік нұсқаулық. Тео. Audel & Co. 1917. 664–669 бб.
- ^ Пантоний, Роул; Килантанг, Алан; Буэнаобра, Бернардино (қараша 2012). "Real time thermal estimation of a Brushed DC Motor by a steady-state Kalman filter algorithm in multi-rate sampling scheme". TENCON 2012 IEEE Region 10 Conference: 1–6. дои:10.1109/TENCON.2012.6412194. ISBN 978-1-4673-4824-9. S2CID 25418197.
- ^ Acarnley, P.P.; Al-Tayie, J.K. (Қаңтар 1997). "Estimation of speed and armature temperature in a brushed DC drive using the extended Kalman filter". IEE материалдары - электр қуатын қолдану. 144 (1): 13–20. дои:10.1049/ip-epa:19970927. ISSN 1350-2352.
- ^ NESTLER, H.; SATTLER, PH K. (1993-01-01). "On-Line-Estimation of Temperatures in Electrical Machines by an Observer". Electric Machines & Power Systems. 21 (1): 39–50. дои:10.1080/07313569308909633. ISSN 0731-356X.
- ^ Mellah, Hacene; Hemsas, Kamel Eddoine; Taleb, Rachid; CECATI, carlo (2018). "Estimation of speed, armature temperature and resistance in brushed DC machines using a CFNN based on BFGS BP". Түрік электротехника және компьютерлік ғылымдар журналы. 26 (6): 3182–3192. arXiv:1902.03171. дои:10.3906/elk-1711-330. S2CID 69944028.
Библиография
- Alger, P. L. (1949). "§7-277 to §7-287 'AC Commutator Motors' in Sec. 7 - Alternating-Current Generators and Motors". In Knowlton, A.E. (ed.). Электр инженерлеріне арналған стандартты нұсқаулық (8-ші басылым). McGraw-Hill. 826–831 беттер.
- Hameyer, Kay (2001). "§5.2 'Basic Equations' in section 5 - DC Machine". Electrical Machine I: Basics, Design, Function, Operation. RWTH Aachen University Institute of Electrical Machines.
- Lynn, C. (1949). "§8-144 to §8-165 'Motor Characteristics and Regulation' in Sec. 8 - Direct-Current Generators and Motors". In Knowlton, A.E. (ed.). Электр инженерлеріне арналған стандартты нұсқаулық (8-ші басылым). McGraw-Hill. 826–831 беттер.
- MIT CIPD (2009). "Understanding D.C. Motor Characteristics". Designing with D.C. Motors. MIT, Mech. Engineering, CIPD. Алынған 2008-12-11.
Сыртқы сілтемелер
- How Electric Motors Work (retrieved from Web Archive on 2014/31/01)